Main Flow
Overview
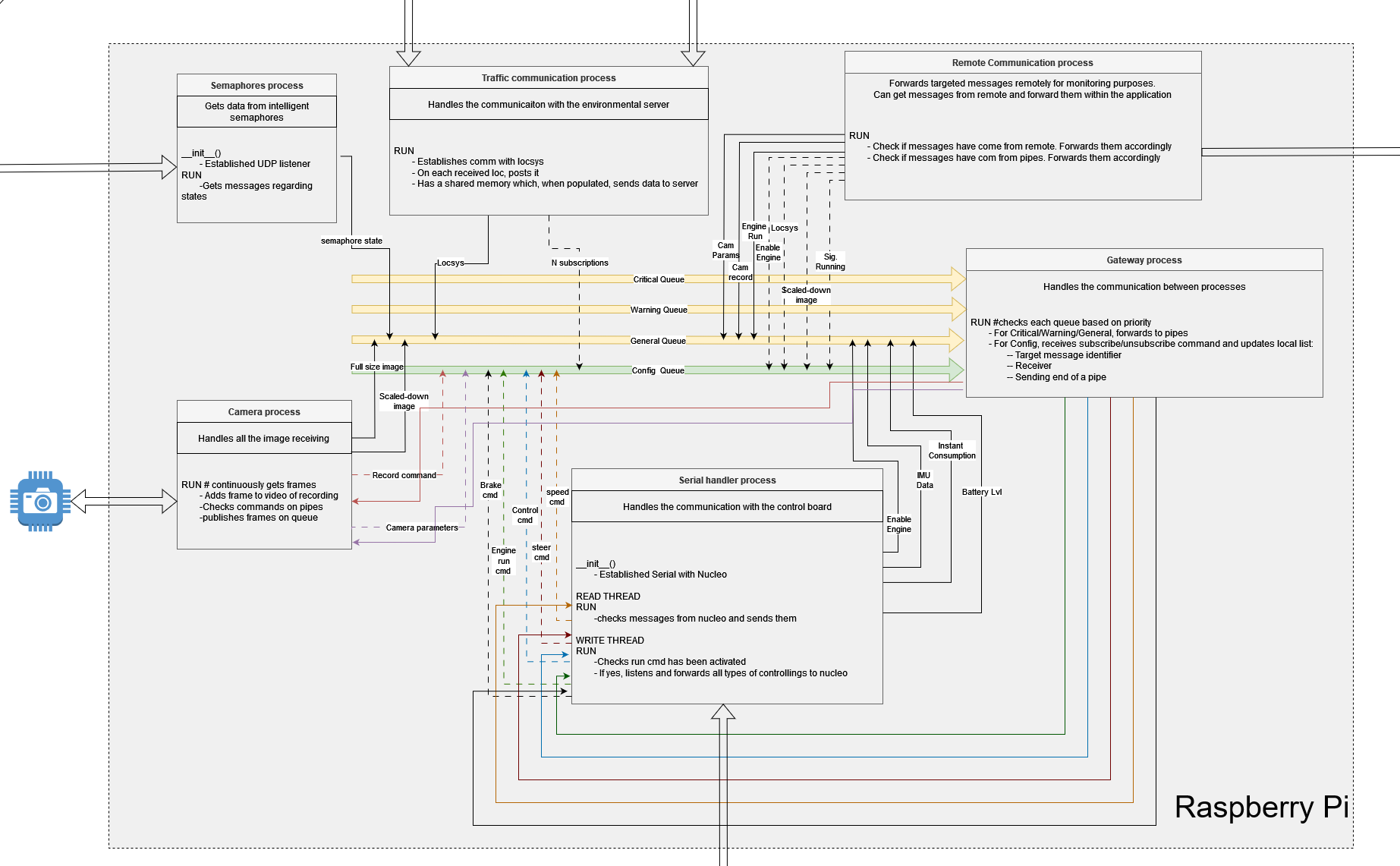
The following diagram shows the connections between the different processes and the Gateway. All the messages on the arrows can be prioritized as you see fit (General, Warning or Critical).
Deep dive
The starting point, Main
The processes project consist of multiple processes that run concurrently and can be activated or deactivated using certain flags present in the Main Script.
This is the script that initiates all the processes, including the most important one - the Gateway. The message queues are initialized as well and they are listed based on priority.
Critical
Warning
General
Config
As mentioned, the queues can be used for prioritization of the messages. Critical, messages that are crucial to the functionality; Warning, something that requires attention; general, for all the information; config, for subscribing/unsubscribing to certain messages.
The Gateway process is started nonetheless, but all the other processes have flags assigned to them.
Camera - enables the Camera process
PCCommDemo - it enables the PC Communication with the Demo app
Sems - enables Semaphores process
Traffic - enables the Traffic Communication process
SerialHandler - enables the Serial Handler process
The Gateway
The GateWay is responsible with checking continuously the messages on all the different queues.
To subscribe to a certain message type, a specific message must be sent on the config queue, which subscribes a Pipe to a specific message. From now on, each message of that type arrives, the gateway will forward it to the registered pipe.
The un-subscribing to specific messages can be done the same way as the subscribing.
On the checking of the queues prioritization can be given to the messages, such as discarding general ones if a critical messages has arrived.
The Camera Process
The Camera Process takes on the crucial role of interacting with the car’s camera, which is the main sensor of the car. This process has a thread that captures real-time images of the car’s surroundings on two different channels (big and small resolution) and sends them on the queue.
The thread is also subscribed to the camera-config message, where other threads/processes can send messages to modify some parameters of the camera.
One other message where the thread is subscribed, is the record message, where start and stop recording commands can be sent.
Demo
The Demo is actually the display server. It subscribes to all the main messages in the car and sends the data to the Demo app, from whom it also receives commands such as speed and steering, and sends them on their queue.
This process enables remote controlling and data exchange.
The Serial Handler Process
This process establishes and maintains a two-way conversation with the STM32 microcontroller embedded in our vehicle. It sends commands to control the car’s various functions, such as: speed set, steering angle set, enable battery data reading, enable IMU data reading and much more… On the other thread instead, it receives information, such as “acknowledge” of the sent command, sensor data (such as “Rotation is…), readings from the powerboard, and so on.
The State Machine
The State Machine is a multiprocessing-safe singleton that manages the system’s operating modes. It ensures that the car transitions correctly between different states and controls which processes are active in each mode.
It uses a Transition Table to validate all mode change requests, preventing invalid transitions.
Modes:
The system comes with several pre-defined modes (Default, Auto, Manual, Legacy, Stop), but you can add as many custom modes as needed.
For detailed instructions on how to add new modes, define transitions, and use the State Machine in your code, please refer to the The State Machine page.