Power board
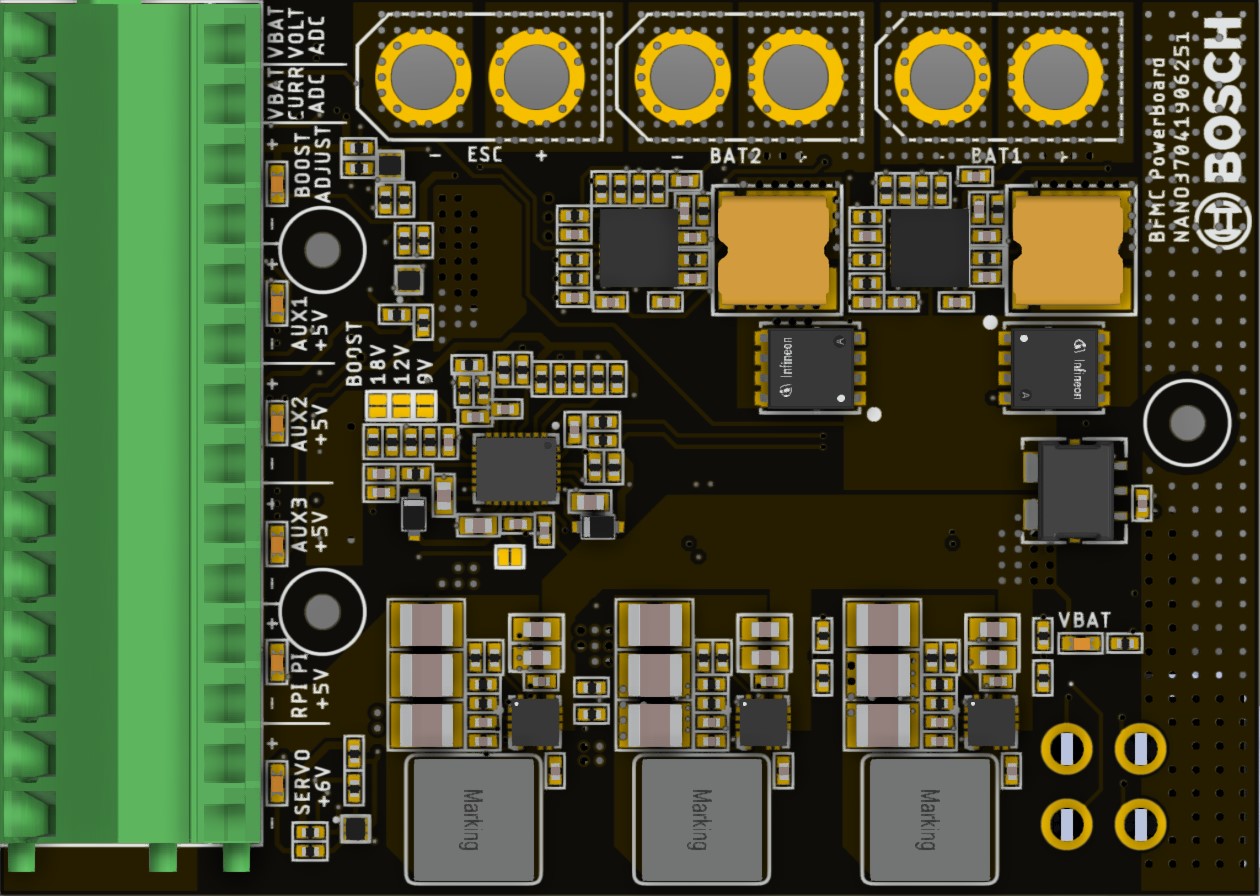
On the robot we built a power distribution board which has the role of managing all the aspects of the power management inside the car.
- For the protection of the batteries, the Powerboard has the following features:
To increase the cars autonomy, two batteries can be connected at any time (the board will work just fine with one).
The VBAT CURR ADC pin returns a voltage value proportional to the instant consumption of the board (~0.33V = 0A, ~2.97V = 100A). (Sensitivity ≈ 26.4 mV/A ; Formula: I(A) ≈ (Vadc - 0.33 V) / 0.0264)
The VBAT VOLT ADC pin returns a voltage value proportional to the total voltage of the battery/s level (~1.615V = 7V, ~2.908V = 16V).
The BOOST ADJUST output can be configured to 9V / 12.1V / 18V, with a maximum output current of 6A.
The (AUX 1/2/3) pins are 5V outputs, each with a maximum current of 1A (per output).
The RPI supply pin provides 5V, with a maximum recommended current of 4A.
The SERVO connector must be used to supply the servo motor (6V, max 5A)
For the current to flow through the board, the switch has to be enabled (Short). The VBAT LED indicates that the Powerboard is powered.
If the current goes below 7V, the board will shut itself down. In this case, the VBAT LED will be off. To safely replace the battery, switch off the board, change it with a fully charged one( >=7.35V), then switch it on.
If VBAT LED is off, the board is not active and the current consumption is almost zero.
Each main power output (SERVO, RPI, AUX1, AUX2, AUX3, BOOST) has its own status LED. These LEDs are normally ON whenever the Powerboard is powered.
If one of these LEDs is OFF while the board is ON, it indicates a short-circuit condition or an overcurrent fault on that specific connector.
If the LED is on and no additional devices(DC motor, servo motor, development board etc) are functional the current consumption is around 70mA.
All the data related to the powerboard can be found here: Power Distribution Board